基于摩拜单车轨迹数据的自行车道规划
下载原始论文请点击这里
总体框架
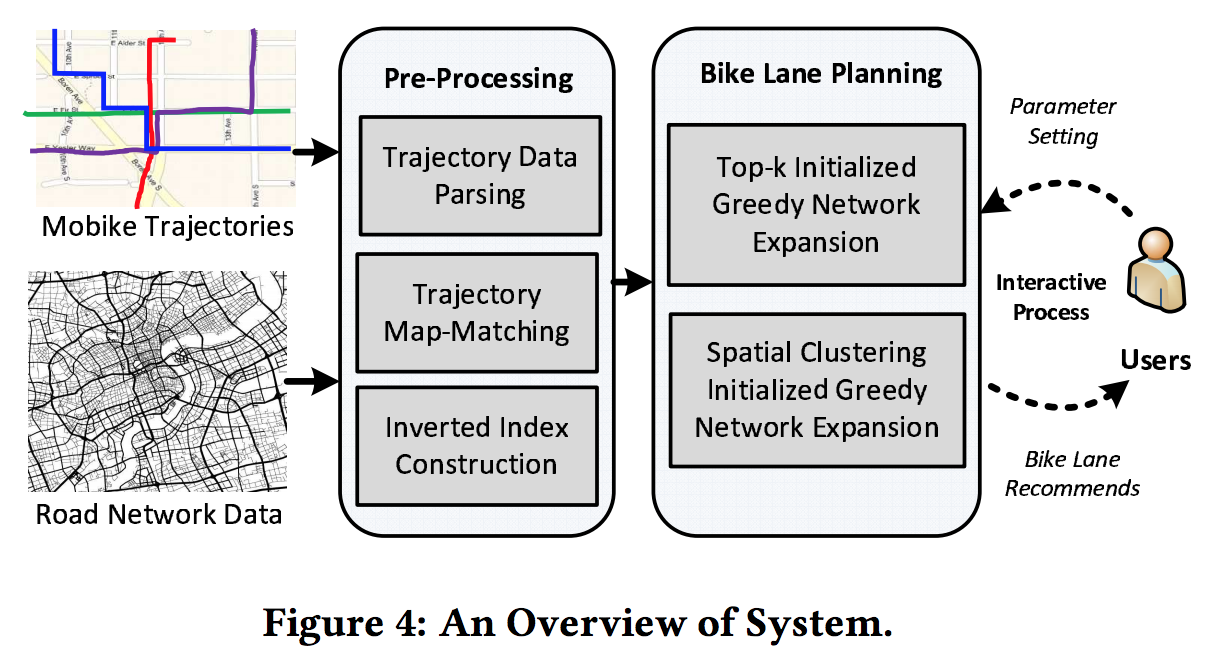
- 输入数据:自行车轨迹 + 路网
- Pre-processing:主要包括轨迹点去噪和地图匹配,以及根据道路ID获取相应轨迹的空间索引机制
- Bike-lane planning:文章的核心部分,基于数据观察的结果,提出了一种贪婪的路网扩散算法,以及该算法依赖的初始化算法
自行车轨迹的特点
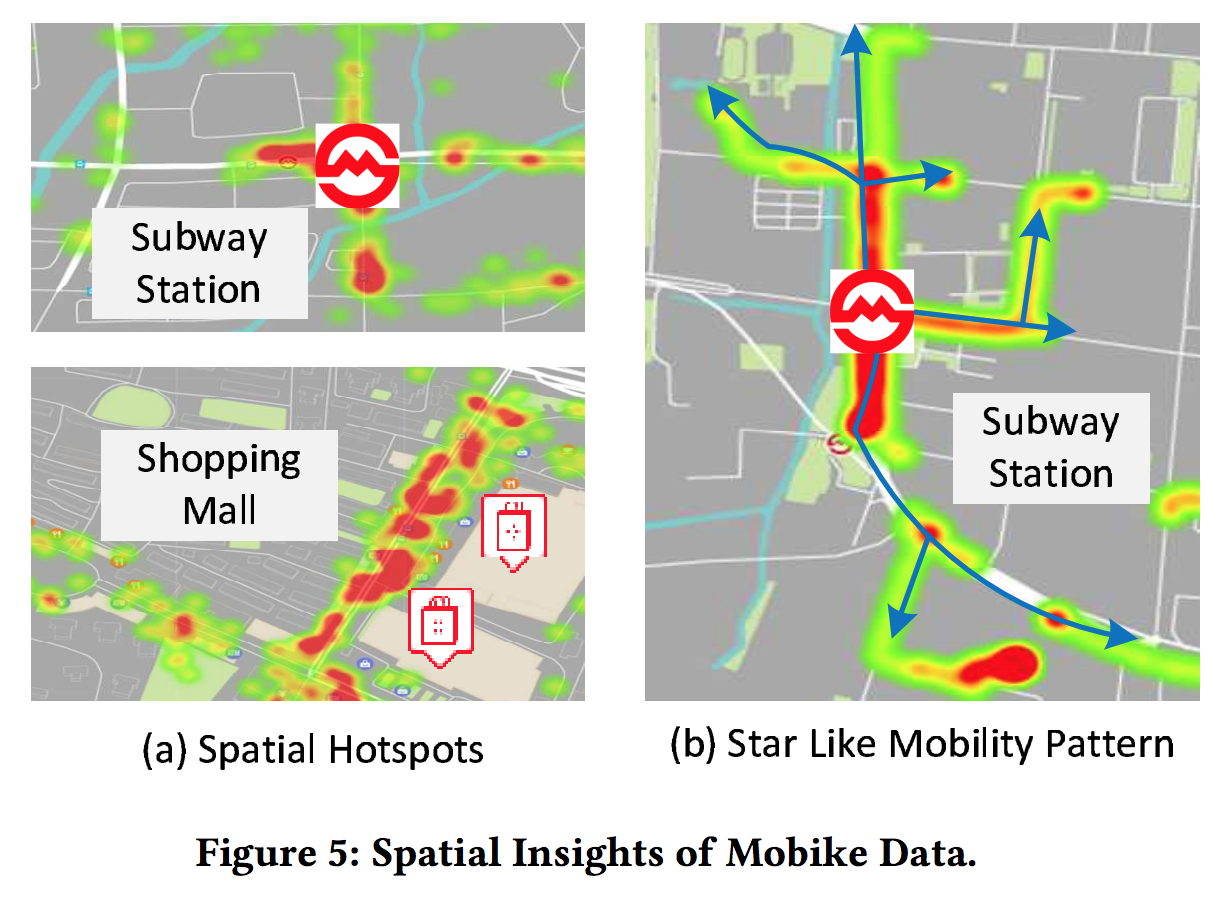
- Spatial hot spots:取出摩拜单车轨迹的起点,绘制热力图,可以发现,最热的点往往是地铁站(左上)或大型商场(左下)
- Star like mobility pattern:根据摩拜单车的行驶轨迹,可以发现大家的出行模式都是从起点开始逐步往外扩散,类似星型(右图)
考虑到hot spots,文章选取了top k热的路段作为算法的初始状态;考虑到star like mobility pattern,文章使用top k的相邻路段不断往外扩展生成自行车道规划结果。
初始化算法
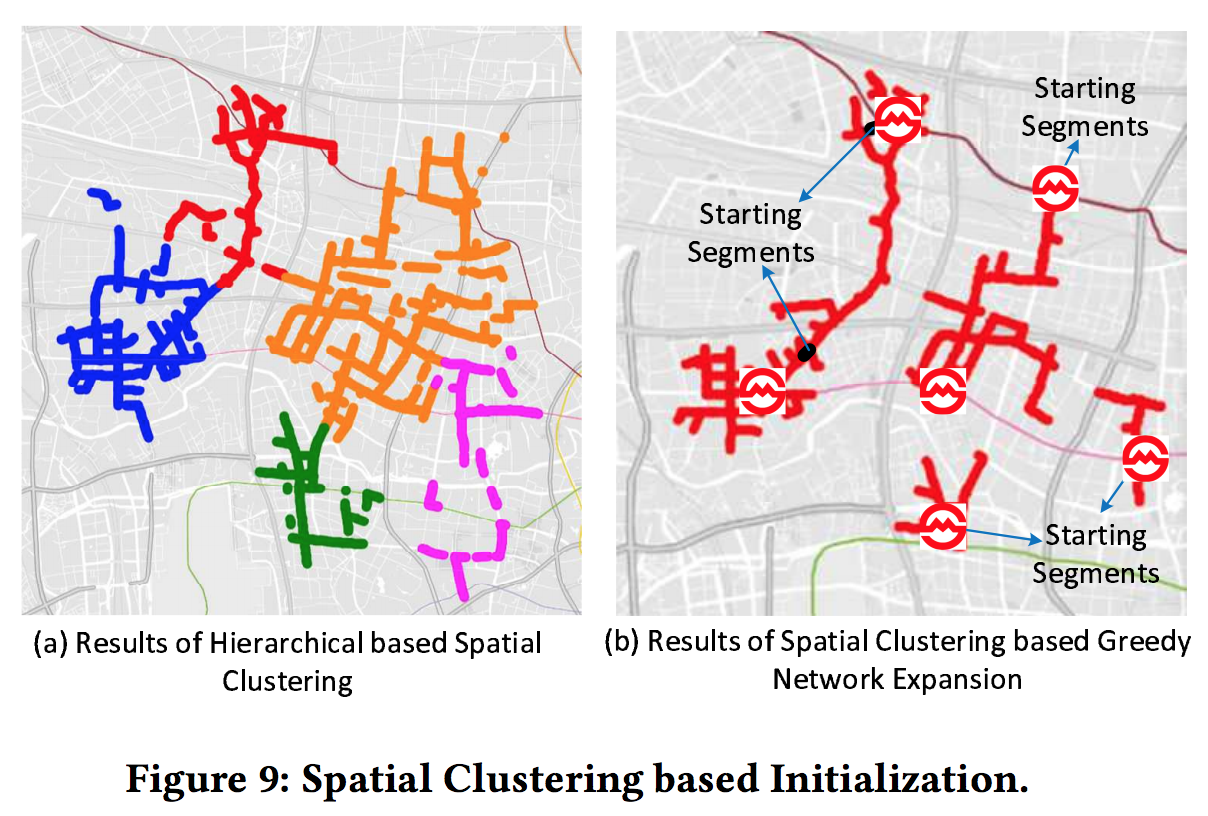
直接选取最热的k个路段作为初始路段的效果不好,因为这k个路段之间往往会连在一块。对于连在一块的路段集合,我们希望只取其中一个路段来做代表。因此,我们需要使用聚类算法。
文章使用的聚类算法流程如下:首先,选出top 1%的路段作为备选,这是为了削减聚类算法的输入数据量,提高算法效率;然后,使用hierarchical-based clustering method(agglomeration hierarchical clustering method)。选择这个聚类算法的原因是:不需要像DBSCAN那样需要精心调整参数才能获取较好的聚类效果;不像kmeans那样获取的结果不稳定。
收益函数
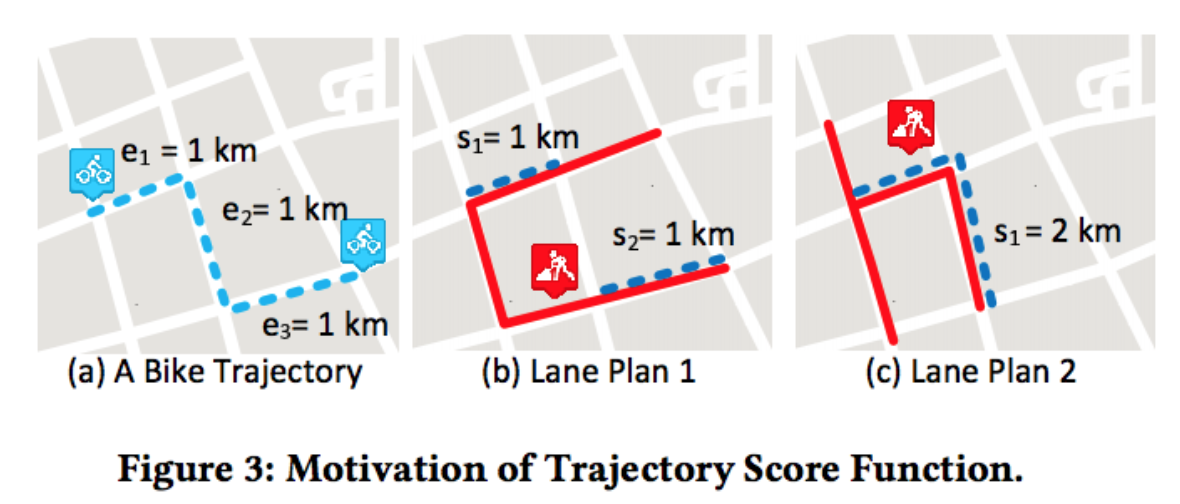
我们使用轨迹对自行车道的规划方案打分。对于一条自行车轨迹,自行车道覆盖的长度越长对用户来讲体验越好。但是,当两种规划方案覆盖的轨迹长度相同时,哪一种好呢?我们认为能够连续行驶的规划方案更好。因此,上图中Plan 2比Plan 1好。
假设轨迹被规划方案覆盖的部分被分为了n段。上图Plan 1把轨迹分为两段,分别是\(s_1=1km\)和\(s_2=1km\);Plan 2把轨迹分为1段,是\(s_1=2km\)。Plan 2的得分应该比Plan 1要高,为了达到这个效果,我们使用下面的公式计算得分:
\[score_i=\sum_{s_j \in S_i} \alpha ^{s_j} s_j, \alpha > 1\]
对于一个路段集合,把每条轨迹的分数加起来作为这个集合的得分。
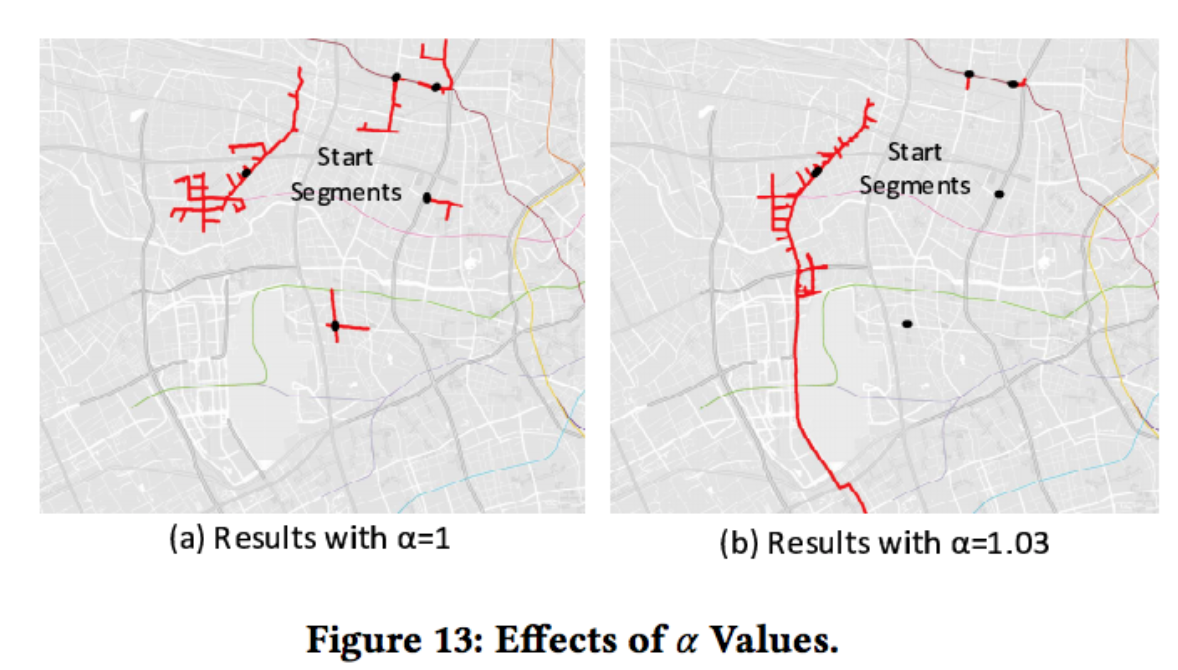
我们可以看一下\(\alpha\)取值的影响效果:
路网扩散方法
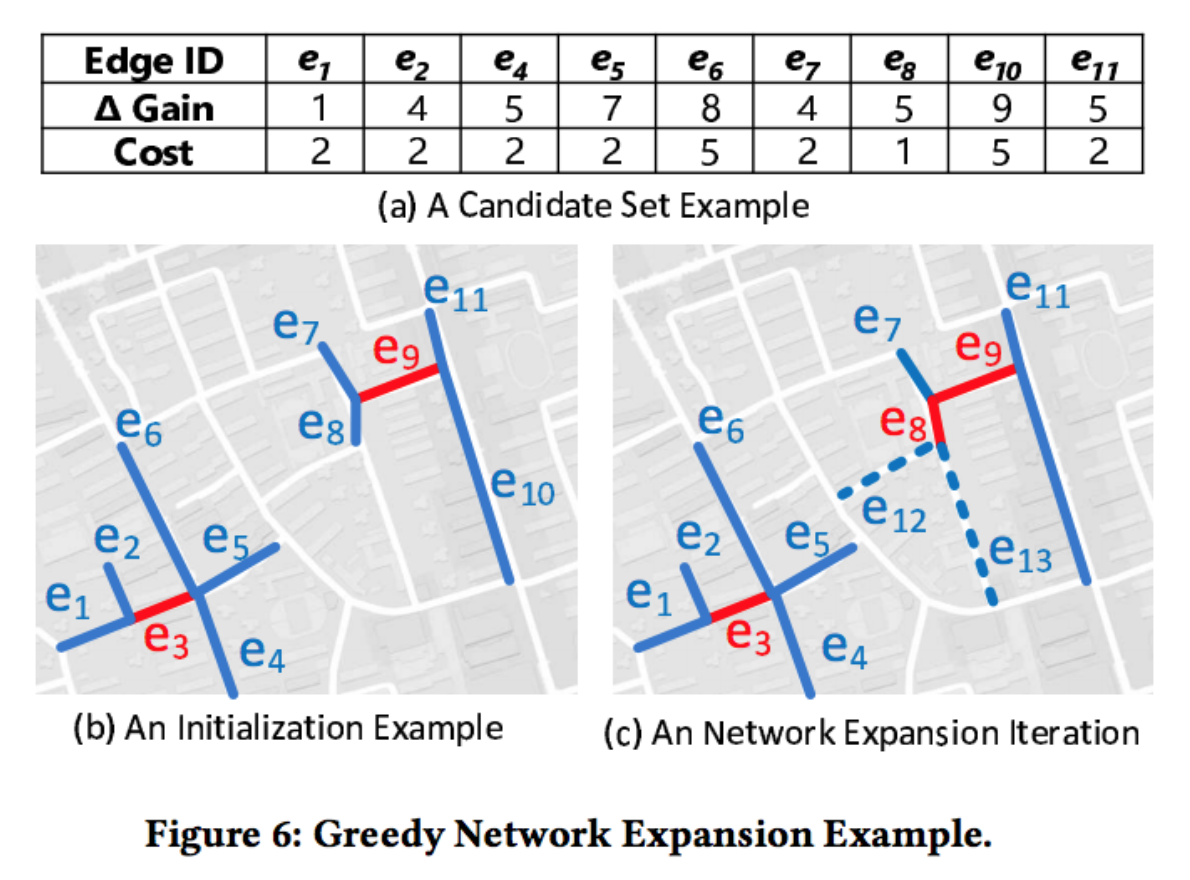
初始化的路段选定以后,我们也获得了相应的邻接路段集合。对每个路段集合,我们评价将其加入后的得分,将得分除以该路段的建设成本得到ratio,将ratio最大的加入集合,如此反复,直到建设成本超出预算。
关于摩拜的轨迹数据
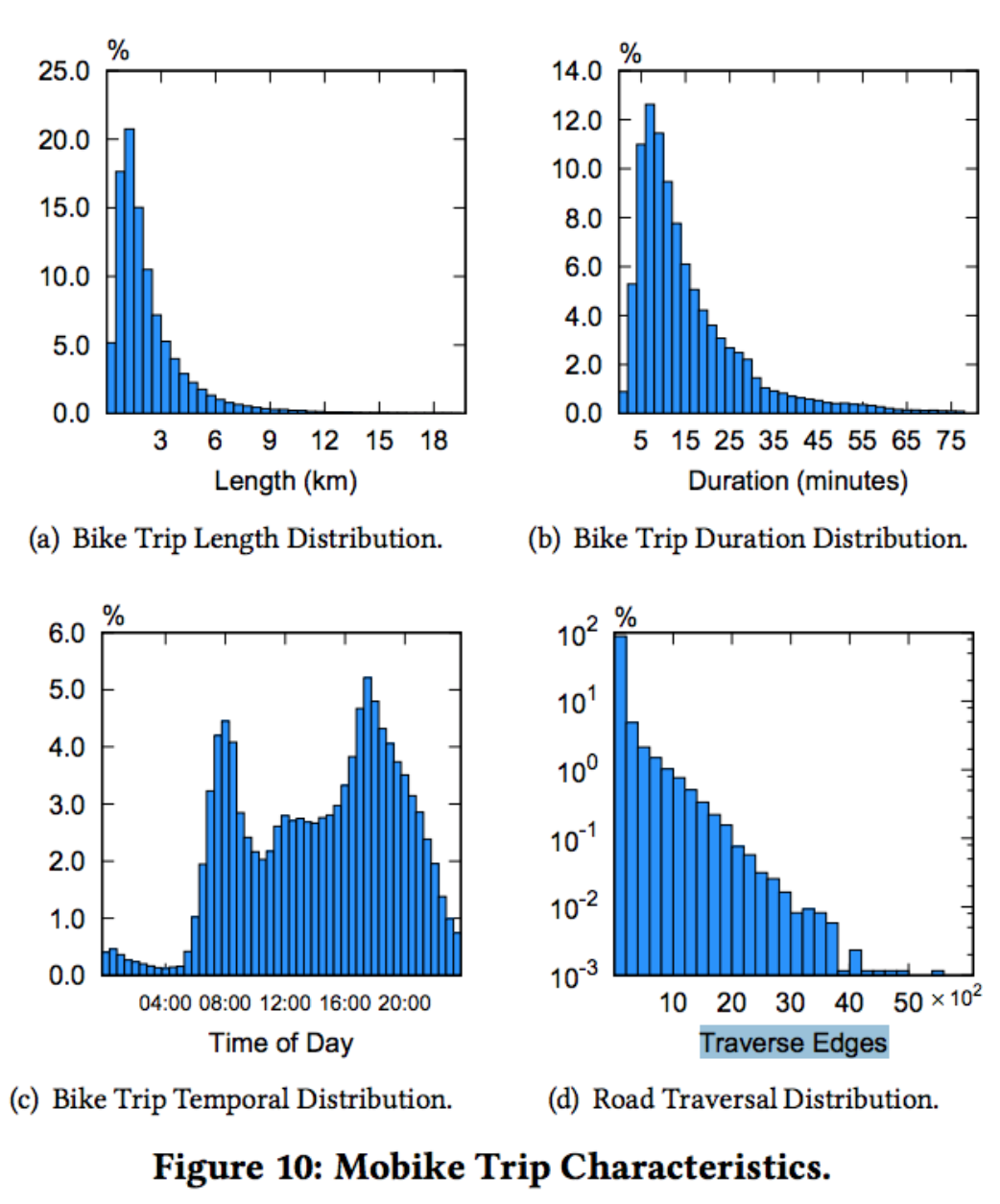
- 70%在2km以下
- 绝大多数不到30分钟
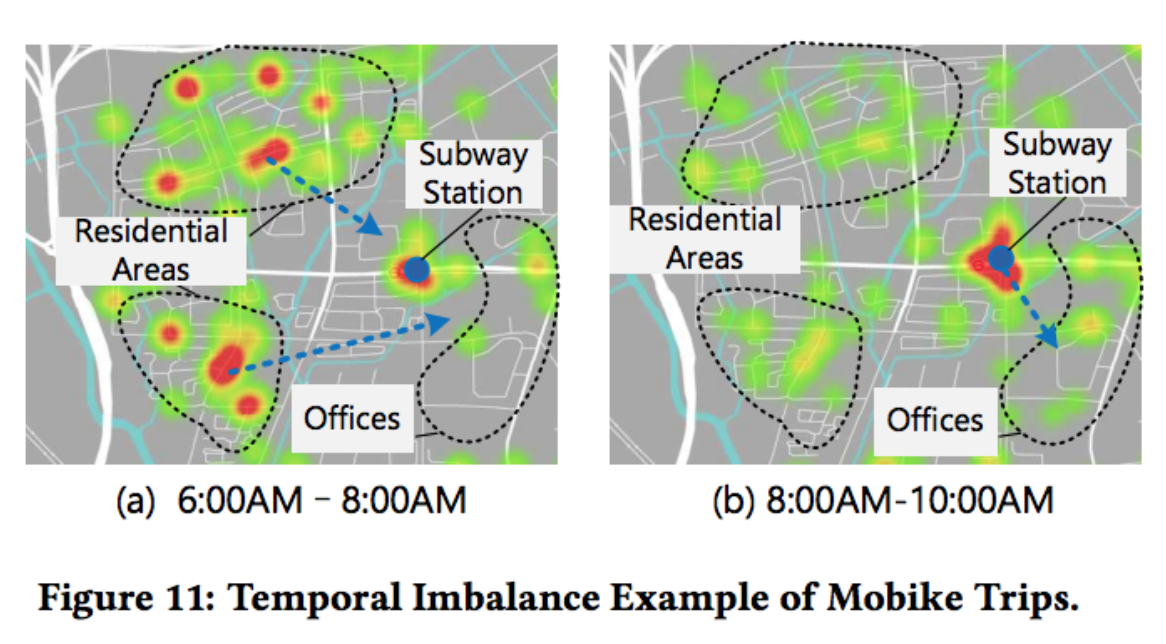
- 早高峰、晚高峰明显,凌晨依然有使用量
- 不详
摩拜单车的时空分布很有意思,如下图: